
Couche physique du bus CAN
Le but de cet essai est de déterminer l’intégrité physique d’un bus CAN (Controller Area Network) en vérifiant ses tensions de ligne basse (CAN-L) et haute (CAN-H).
Guide de connexion
La connexion pour effectuer la mesure varie en fonction de l’application.
Les techniciens doivent autant que possible accéder au circuit d’essai sans endommager les joints ni l’isolation. Si ce n’est pas possible, assurez-vous que les réparations appropriées sont effectuées.
Conseil de connexion general
Le PicoScope est livré avec une variété d’accessoires offrant plusieurs options de connexion au véhicule. En fonction de la difficulté d’accès, choisissez parmi :
Essayez TOUJOURS d’éviter d’utiliser des sondes de test directement dans les connecteurs femelles car cela endommagerait facilement le connecteur et lui causerait une perte de tension du ressort, créant ainsi une mauvaise connexion physique et électrique. Cette méthode nécessite également généralement deux mains pour maintenir les fils d’essai en place, ce qui n’est pas pratique pour la plupart des tests, en particulier si un essai sur route est nécessaire !
Pour tester les capteurs et les actionneurs (y compris les circuits / connecteurs correspondants) :
- Lors du test d’un capteur, il est préférable d’accéder à l’unité de commande plutôt qu’au capteur.
- Lors du test d’un actionneur, il est préférable de pouvoir accéder à l’actionneur plutôt qu’à l’unité de commande.
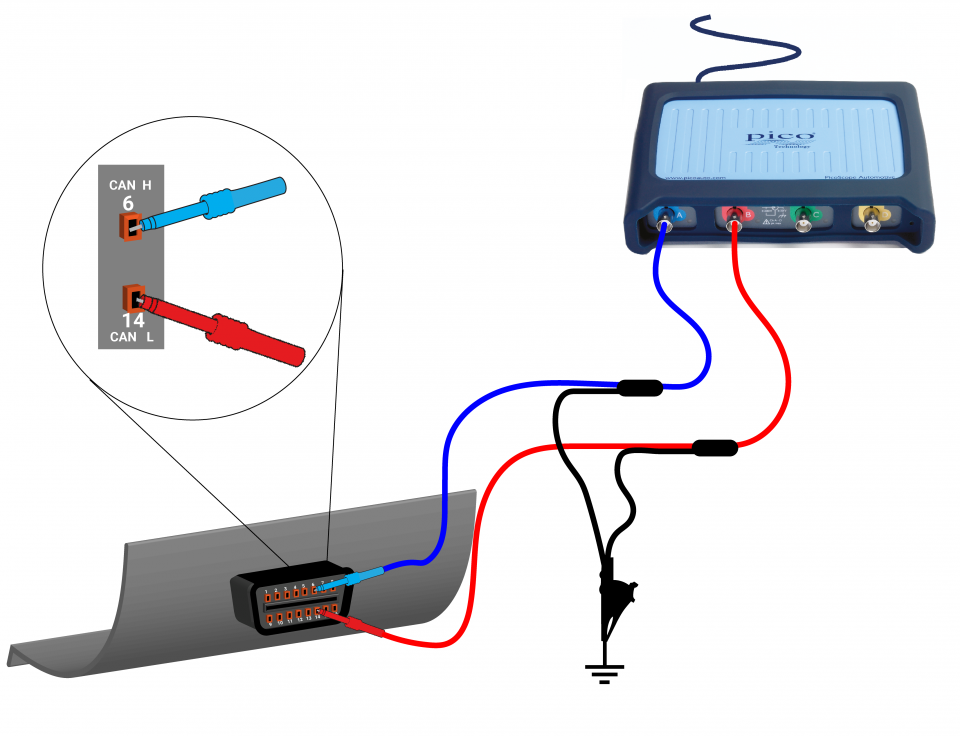
Comment effectuer le test
- Localisez la prise de diagnostic (DLC).
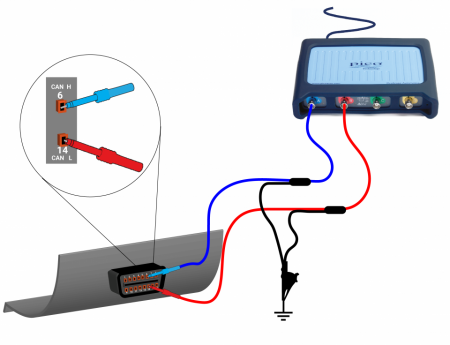
- Connectez le PicoScope Channel A à la borne 6 et à la masse du châssis.
- Connectez le PicoScope Channel B à la borne 14 et à la masse du châssis.
- Réduisez la page d’aide. Vous verrez que le PicoScope a affiché un exemple de forme d’onde et est préréglé pour capturer votre forme d’onde.
- Démarrez le PicoScope pour voir les données en direct.
- Mettez le contact.
- Arrêtez l’oscilloscope avec vos formes d’onde actives à l’écran.
- Coupez le contact.
- Utilisez les outils Tampon de forme d’onde, Zoom et Mesures pour examiner votre forme d’onde.
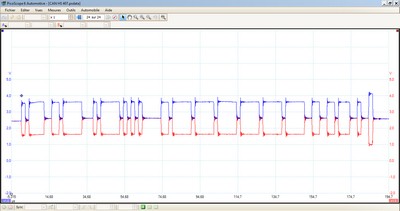
Exemple de forme d’onde
Notes de forme d’onde
Ces bonnes formes d’onde connues présentent les caractéristiques suivantes :
Les formes d’onde CAN-L et CAN-H se reflètent mutuellement environ 2,5 V et ont une amplitude crête à crête de 1 V.
La forme d’onde CAN-L passe de 2,5 V à 1,5 V et la forme d’onde CAN-H de 2,5 V à 3,5 V.
Les tensions basses et hautes et les transitions entre elles sont sans bruit ou distorsion significatif.
Deux messages CAN complets, chacun ayant une tension plus prononcée à la fin.
CAN-L et CAN-H restent à 2,5 V dans les intervalles entre les messages.
La durée la plus courte entre un basculement sur un état de tension et le retour est de 2 µs, ce qui indique une vitesse de bus de 500 kbit/s.
Waveform Library
Accédez à la barre de menu déroulante située dans le coin inférieur gauche de la fenêtre Waveform Library et sélectionnez le bus CAN H ou le bus CAN L.
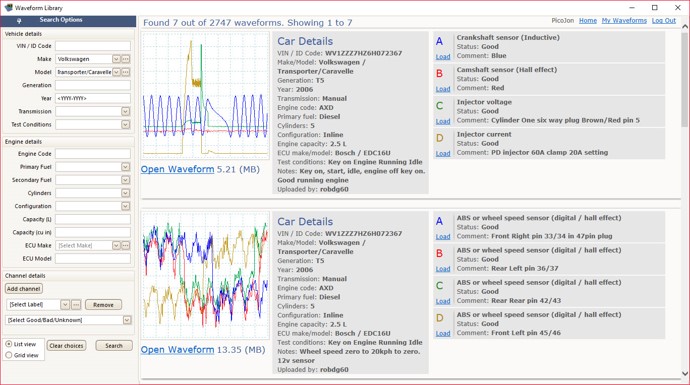
Le ‘Waveform Library’ comprend plusieurs milles exemples des signaux de référence d’un grand parc de véhicules et de composants. Cette base de données est essentielle pour tous ceux qui travaillent sur une large gamme de véhicules.
Tout utilisateur peut employer les traces dans le Waveform Library, et elles sont prêt à employer sur le véhicule, sans avoir besoin de jouer avec les réglages du PicoScope.
Le Waveform Library est accessible à partir du ‘Fichier’ dans PicoScope 6 – pas dans PicoDiagnostics. Il vous faut une connexion à l’Internet, ainsi qu’un identifiant – ce qui est le même que l’identifiant employé pour le forum du Pico.
Contactez-nous en cas de problème.
Plus de conseils
Un bus CAN assure la communication série entre les unités de contrôle. Par exemple, un bus CAN du groupe motopropulseur permet à une unité de commande ABS de diffuser simultanément un message contenant des données de vitesse de roue au module de commande du moteur (ECM), au module de commande de transmission (TCM), au groupe d’instruments (IC) et au système de retenue supplémentaire (SRS). .
Les messages CAN sont transmis numériquement sous forme d’une série de valeurs basses ou élevées au sein d’une structure fixe appelée trame. La plus petite unité de données dans ces messages codés binaires est un bit, représentant logiquement 0 ou 1. Un identificateur de message suit le début de la trame. L’identifiant facilite l’arbitrage du message lorsque deux unités de contrôle ou plus tentent de diffuser un message en même temps. Plus la valeur de l’identifiant est basse, plus la priorité du message est élevée. Diverses valeurs, notamment la charge de données et une somme de contrôle, suivent l’identificateur.
Lorsqu’une unité de commande reçoit un message, elle calcule une somme de contrôle à partir de la charge utile de données et la compare à la valeur diffusée dans le message. Si les deux sont égaux, le message est valide. L’unité de contrôle réceptrice le confirme en transmettant un accusé de réception lors de l’avant-dernier bit du message diffusé. Par conséquent, le diffuseur saura si une unité de contrôle a reçu un message invalide.
Les bus CAN sont à faible vitesse ou à grande vitesse. Les bus à faible vitesse communiquent à un débit fixe allant jusqu’à 125 kbit/s, alors que les bus à haut débit communiquent à un débit fixe allant jusqu’à 1 Mbit/s. Une variante, CAN FD, communique à des débits variables jusqu’à 12 Mbit/s. L’application détermine la vitesse du bus. Par exemple, les bus CAN de groupe motopropulseur essentiels à la sécurité nécessitent une communication en temps réel et sont toujours à haute vitesse, fonctionnant généralement à un débit de 500 kbit/s.
Les passerelles CAN connectent des bus de différentes vitesses ou types. Par exemple, un circuit intégré peut servir d’interface entre les bus CAN du groupe propulseur et du bus commode pour fournir, entre autres, une fonctionnalité de verrouillage automatique des portes. Par exemple, un message de vitesse de véhicule de l’unité de commande ABS sur le bus à vitesse supérieure peut être transmis à l’unité de commande confort sur le bus à vitesse inférieure via le circuit intégré. Le module de contrôle de la commodité saurait alors verrouiller les portes une fois la vitesse atteinte.
Les passerelles peuvent également contrôler l’accès de diagnostic. Lorsqu’ils sont présents, les testeurs de diagnostic doivent établir une communication avec la passerelle via la prise de diagnostic – DLC. La passerelle transmet ensuite des messages de diagnostic entre le testeur et les autres unités de contrôle. Le testeur n’a pas d’accès direct aux autres bus CAN ou à leurs messages. De plus, il ne sera pas possible d’utiliser le DLC comme point d’accès pour tester l’intégrité du bus CAN. Les emplacements de test alternatifs doivent être identifiés.
La différence de tension entre les lignes CAN-L et CAN-H représente l’état logique du bus. Par conséquent, les lignes sont référencées les unes par rapport aux autres plutôt qu’à un potentiel externe, tel que la masse du châssis. Cette disposition différentielle améliore la réjection du bruit car les interférences affectent les lignes de la même manière et leur différence de tension est maintenue. En règle générale, les lignes sont configurées sous forme de paires torsadées afin de réduire les effets d’interférence.
Dans certains bus CAN, où les unités de commande connectées partagent un potentiel de référence commun (par exemple, la masse du châssis), les contrôleurs CAN peuvent basculer sur le fonctionnement sur une seule ligne pour offrir une tolérance de panne en cas de circuit ouvert sur le CAN-L ou le CAN-H lignes.
Les bus CAN haute vitesse utilisent des résistances de terminaison pour éliminer les réflexions de transmission dans le bus. Sans les résistances, les transmissions peuvent rebondir des points finaux et déformer les messages. En règle générale, une résistance de 120 ohms est utilisée pour connecter les lignes CAN-L et CAN-H dans les deux unités de contrôle situées à chaque extrémité du bus. Dans cette configuration parallèle, la résistance totale entre les lignes CAN-L et CAN-H est d’environ 60 ohms. Par conséquent, la mesure de cette résistance indiquera l’intégrité du bus.
Les mesures de résistance ne doivent pas être effectuées sur des bus sans résistances de terminaison, à moins que toutes les unités de contrôle connectées aient été préalablement déconnectées.
Les défauts du bus CAN peuvent provoquer de nombreux symptômes. Généralement, ils se caractérisent par une perte partielle ou totale de la fonctionnalité du véhicule ou du système, ou par un avertissement visuel ou sonore du conducteur du véhicule.
Les bus CAN peuvent être sujets à des défauts de circuit, tels que:
- des courts-circuits des lignes CAN-L ou CAN-H vers B-, B + ou l’un vers l’autre;
- circuits ouverts dans les lignes, résistances de terminaison ou connexions CAN-L et CAN-H
- interférences de lignes CAN non torsadées ou dégradation de leur blindage, pouvant résulter de réparations précédentes, de l’utilisation de sondes de perforation, de l’abrasion ou de l’usure générale ;
- interférences provenant d’autres composants électriquement bruyants.
De même, les unités de contrôle connectées peuvent être sujettes à des défauts avec :
-
- circuits d’alimentation ou de masse ;
- contrôleurs et émetteurs-récepteurs CAN ; ou
- les logiciels pouvant résulter d’une corruption de la mémoire, d’une programmation incorrecte, ou d’erreurs de codage.





