
Contrôler un Capteur de Stationnement à ultrasons avec PicoScope
Un capteur de stationnement peut aussi être nommé un ‘capteur de proximité’. Il existe deux types de capteur de stationnement d’usage courant: électromagnétique et ultrasonique. Cet article concerne les capteurs à ultrasons, car nous nous intéressons à la démonstration de l’utilisation du détecteur de capteur de stationnement à ultrasons Pico – TA329.
Vous aurez besoin d’un PicoScope pour effectuer ce test.
Une liste des accessoires appropriés se trouve sur cette page.

Le but de ce test est d’évaluer le fonctionnement des capteurs de proximité à ultrasons (appelés capteurs de stationnement) avec le détecteur de capteur de stationnement à ultrasons de Pico – TA329.
Avis de sécurité:
Pour tester les capteurs de proximité, il peut être nécessaire de faire tourner le moteur, et d’avoir sélectionné une vitesse (par exemple, marche arrière). En aucun cas, ce test ne doit être effectué sans un conducteur qualifié en contrôle du véhicule durant le test. Le test des capteurs de proximité nécessite donc deux opérateurs ; un pour contrôler le véhicule et un pour acquérir le signal pertinent.
Remarque : Le bon fonctionnement des capteurs de stationnement dépend de:
- leur position / orientation (composants de l’après-marché)
- la connectivité du faisceau de câbles
- la contamination ou de la dégradation de la surface
- la fonctionnalité de l’unité de contrôle
- leur environnement opérationnel étant éloigné des sources d’activités de télécommunication et ultrasons intenses.
Comment effectuer le test du Capteur de stationnement.
Accessoires et réglage :
TA329 – Détecteur de capteur de stationnement à ultrasons.
Paramètres PicoScope :
Canal A

CC couplé
Plage d’entrée : ± 50 mV
Base de temps : 1 ms / div
(Base de temps optionnelle : 100 ms / div)
Nombre d’échantillons : 1 MS
Déclencheur : Canal A, Auto
Front montant : environ 10 mV
30% d’activité avant déclenchement
(Toute une aide se trouve dans les logiciels de PicoScope à partir du menu.)
Comment connecter le PicoScope :
Connectez le détecteur du capteur de stationnement au canal A sur le PicoScope.
Exécutez PicoScope en appuyant sur la barre d’espace de votre clavier ou sur le bouton ‘Déclencher la capture’ du PicoScope. (Tout en bas de l’écran à gauche).
Activez les capteurs de stationnement du véhicule (voir le manuel du véhicule). Une assistance peut être nécessaire pour assurer la sécurité personnelle (voir l’Avis de sécurité).
Tenez le détecteur du capteur de stationnement près de la surface du capteur de stationnement – environ 25 mm
Tout en prévoyant le détecteur de capteur de stationnement directement au capteur de stationnement, manœuvrez-le de manière circulaire pour obtenir le meilleur signal possible.
Arrêtez le PicoScope en appuyant sur la barre d’espace de votre clavier ou sur le bouton Arrêt de PicoScope.
Éteignez le moteur et sécurisez le véhicule.
Utilisez le tampon de forme d’onde pour faire défiler vos formes d’onde capturées pour évaluer les capteurs de stationnement testés.
Formes d’onde de référence :
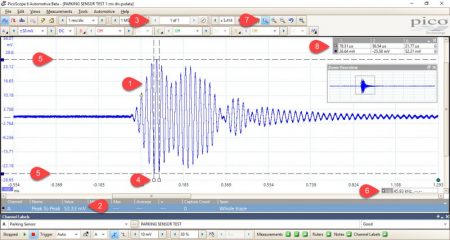
Marqueur 1 – Signal haute fréquence
Marqueur 2 – Mesure crête à crête
Marqueur 3 – Tampon de forme d’onde
Marqueur 4 – Règles de temps
Marqueur 5 – Règle de signal
Marqueur 6 – Légende de fréquence
Marqueur 7 – Zoom fenêtrée
Marqueur 8 – Légende de règle

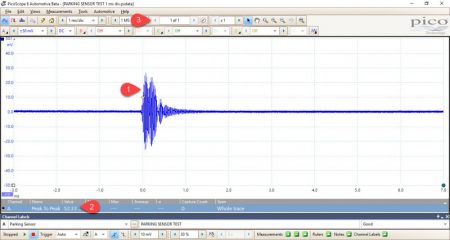
Exemple-trace-4 Base temps plus longue.
Diagnostic :
La sortie du capteur de stationnement peut être mesurée avec le détecteur de capteur de stationnement à ultrasons pour confirmer l’activité sur le capteur de stationnement en cours de test. En général, la fréquence du signal généré par un capteur de stationnement est d’environ 40 000 Hz (40 kHz), qui est supérieure à la fréquence du son audible pour les humains (ultrasons).
Le détecteur de capteur de stationnement est réglé pour détecter des signaux haute fréquence comme ceux proches du capteur de stationnement. La fréquence élevée excitera le capteur à l’intérieur du détecteur pour produire une tension, reflétant l’activité du capteur de stationnement et afficher le signal sur votre écran PicoScope.
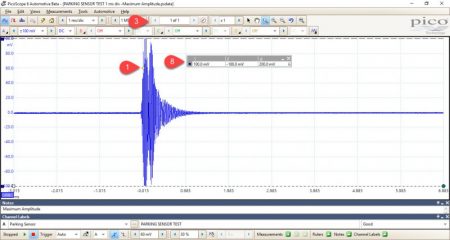
Signal haute fréquence (marqueur 1)
Utilisez la fonction de zoom fenêtrée (marqueur 7) pour dessiner une boîte autour du point d’amplitude de crête du signal capturé (marqueur 5). Cela augmentera le zoom et révélera chaque cycle de la forme d’onde capturée.
Utilisez les règles temporelles (marqueur 4) pour mesurer la fréquence d’un cycle à l’amplitude de pic approximative (marqueur 5). La valeur de la fréquence est affichée dans la légende de la fréquence (marqueur 6).
Dans les formes d’onde d’exemple ci-dessus, la fréquence de fonctionnement mesurée de notre capteur de stationnement est de 45,93 kHz.
La mesure de la valeur crête à crête (marqueur 2)
Cliquez sur les ‘Mesures’, puis sur l’option ‘Ajouter une mesure’.
Sélectionnez le canal vers lequel vous souhaitez ajouter une mesure ; sélectionnez ‘Crête à Crête’ comme type de mesure et ‘trace complète’ comme zone de la forme d’onde que vous souhaitez mesurer.
Cliquez sur ‘OK’ et vos sélections ajouteront la tension de crête à crête de votre forme d’onde capturée comme valeur numérique.
Les valeurs typiques peuvent varier entre 50 mV et 200 mV en fonction de l’emplacement et de la distance du détecteur par rapport au capteur de stationnement.
Une autre méthode pour mesurer les tensions de crête à crête serait d’utiliser les règles de signal (marqueur 5):
Faites glisser les deux règles de signal pour aligner avec des zones spécifiques de la forme d’onde (par exemple, min. Et max) où les valeurs numériques min., max., et delta des règles de signal sont affichées dans la légende de la règle (marqueur 8). Comparez les amplitudes de crête de chaque capteur de stationnement. Cela vous permettra d’évaluer toute différence opérationnelle entre les capteurs.
Les règles temporelles (marqueur 4), les règles de signal (marqueur 5) et la règle de la légende de (marqueur 8).
Une fois que les règles du temps et du signal ont été glissé sur le tampon de forme d’onde, leurs valeurs numériques min., max., et delta seront affichées dans la légende de la règle.
Vous pouvez également utiliser la fonction de verrouillage pour verrouiller une paire sélectionnée de règles ensemble, ce qui les fait passer en synchronisme pour aider à des mesures de comparaison pour plusieurs événements.
Plus d’information :
Un capteur de stationnement typique peut être considéré comme un émetteur et un récepteur. Un dispositif piézoélectrique interne est utilisé pour générer une impulsion haute fréquence dans l’air, et également pour convertir toutes les impulsions réfléchies en une tension significative par rapport à la distance.
Le capteur de stationnement est initialement conduit par l’ordinateur de bord embarqué pertinent pendant un temps suffisant pour exciter l’élément piézoélectrique à haute fréquence (40 kHz). Cette excitation entraîne l’émission d’une impulsion de pression à partir de la surface du capteur de stationnement. Pensez à la pulsation de pression comme une onde sonore inaudible.
Le temps nécessaire pour exciter le capteur de stationnement (contrôlé par ordinateur) est critique car l’élément piézoélectrique doit résonner à 40 kHz presque instantanément, puis revenir au repos et attendre tout réflexe. Le retour au repos d’une fréquence aussi élevée prendra toutefois du temps et ce temps de désintégration est appelé sonnerie (cela peut être assimilé à une cloche qui continue à sonner longtemps après la frappe d’un marteau). Ici, nous dissipons l’énergie sonore générée par l’élément piézoélectrique.
Au cours de la sonnerie, l’ordinateur de bord s’arrêtera avant d’écouter les réflexions reçues par le capteur de stationnement, car la sonnerie peut bien interférer et dissimuler toute réflexion réelle.
Lorsque les ondes sonores quittent la surface du capteur de stationnement, le temps nécessaire pour que l’élément piézoélectrique reçoive les ondes sonores réfléchies détermine la distance entre le capteur de stationnement et l’objet réfléchissant.





