Comment raccorder l’oscilloscope en cours d’essai double trace : CAN H et CAN L
Comment effectuer le test
Utilisation du boîtier de test CAN
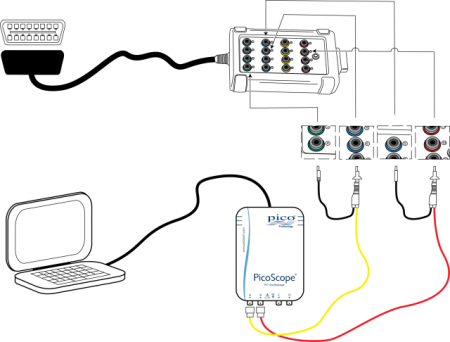
Tout d’abord, raccordez la fiche à 16 broches de le boîtier de test CAN dans le connecteur de liaisons de diagnostics (DLC) situé sur le véhicule, comme l’illustre la Figure 1. Les LED sur le boîtier de test CAN s’allument pour vous informer que la communication a été établie, et pour vous indiquer les broches qui sont actives sur le DLC (prise diagnostic) auquel vous êtes raccordé. Il est important de veiller à ce que les broches suivantes soient illuminées, car cela indique que le boîtier de test CAN est sous tension et qu’elle fonctionne correctement :
En utilisant les câbles fournis avec le boîtier de test CAN, raccordez le câble JAUNE au canal A de l’oscilloscope et la fiche banane JAUNE à la broche 6. Puis raccordez la fiche banane NOIRE de 4 mm à la broche 4 pour fournir la masse de l’oscilloscope. Raccordez le câble ROUGE au canal B de l’oscilloscope et la fiche banane ROUGE à la broche 14. Puis raccordez la fiche banane NOIRE de 4 mm à la broche 5 pour fournir la masse du circuit. Les raccordements sont illustrés dans les Figures 1 et 2.
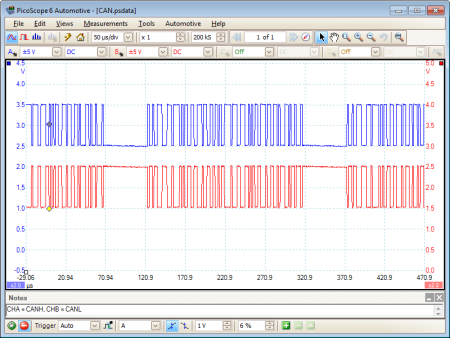
Appuyez sur la barre d’espace de l’ordinateur pour que l’oscilloscope commence à afficher les données en direct. Vous devrez peut-être activer l’allumage du véhicule. Les formes d’ondes CAN-H et CAN-L s’affichent à l’écran, comme illustré ci-dessous.
Exemple de formes d’ondes
Remarques sur les formes d’ondes
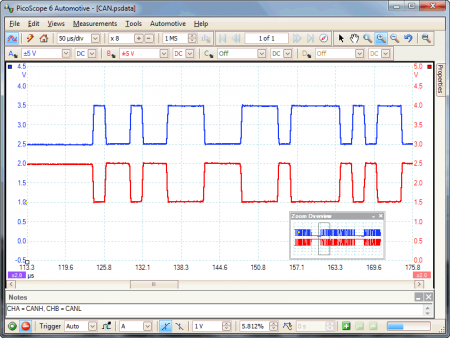
Dans cet affichage, nous pouvons vérifier que les données sont continuellement échangées le long du bus CAN, et il est possible de vérifier que les niveaux de tension de crête à crête sont corrects et qu’un signal est présent sur les deux lignes du CAN. Comme le CAN utilise une signalisation différentielle, le signal sur une ligne doit refléter les données sur l’autre ligne. La raison habituelle pour laquelle on examine les signaux du CAN est qu’un défaut de CAN a été indiqué par OBD ou c’est pour vérifier la connexion du CAN à un nœud (UCE) de CAN présumé défectueux . Le manuel du constructeur du véhicule doit être consulté pour connaître les paramètres précis des formes d’ondes. (Le ‘Waveform Library’ du Pico – accessible directement d’un PicoScope branché sur l’Internet – comprend de nombreux exemples des constructeurs différents.) Les données de CAN suivantes sont acquises sur une base de temps beaucoup plus rapide et permettent de visualiser les changements d’état individuels. Cela permet de vérifier la nature d’image symétrique des signaux et la coïncidence des bords.
Formes d’ondes CAN-H et CAN-L standards en détail
Ici, nous voyons clairement que les signaux sont égaux et opposés, et qu’ils sont de la même amplitude. Les bords sont propres et qui coïncident entre eux. Ceci indique que le bus CAN permet une communication entre les nœuds et le régulateur du CAN. Ce test vérifie efficacement l’intégrité du bus à ce stade dans le réseau CAN et, si un ECU (nœud) particulier ne répond pas correctement, le défaut pourrait provenir de l’ECU même. Le reste du bus devrait fonctionner correctement.
Il peut être nécessaire de vérifier l’état des signaux présents sur le connecteur de chaque ECU sur le réseau CAN, à titre de vérification finale. Les données au niveau de chaque nœud sont toujours les mêmes sur le même bus. N’oubliez pas qu’une grande part des données sur le réseau sont critiques pour la sécurité, alors N’UTILISEZ PAS de sondes à perçage d’isolant sur les lignes de bus CAN !
Informations techniques – Bus de données du véhicule (bus CAN)
Le bus CAN est un système de communication série utilisé sur de nombreux véhicules automobiles pour raccorder les systèmes et capteurs individuels, en tant qu’alternative aux faisceaux standards à câbles multiples. « CAN» est un acronyme qui signifie « Controller Area Network » (réseau local de commande). Il est de plus en plus couramment utilisé dans les voitures particulières et dans les véhicules utilitaires. Ses avantages incluent des économies de poids significatives, sa fiabilité, sa facilité de fabrication et davantage d’options de diagnostic embarqué. Ses inconvénients incluent des coûts accrus, et la nécessité de disposer de connaissances spécialisées lors de l’entretien et de la réparation du véhicule.
Le contrôleur CAN se trouve au cœur d’un bus CAN. Il est raccordé à tous les composants (nœuds) sur le réseau par le bais des câbles CAN-H et CAN-L. Le signal est différentiel : chacune des lignes CAN est référencée à l’autre ligne, pas à la masse du véhicule. Cela permet une amélioration considérable de l’élimination du bruit lorsqu’on les utilise dans des environnements électriquement bruyants, comme les véhicules à moteur.
Chaque nœud du réseau possède un identificateur unique. Puisque les UCE sur le bus sont effectivement en parallèle, tous les nœuds voient toutes les données, en permanence. Un nœud ne réagit lorsqu’il détecte son propre identificateur. Par exemple, lorsque l’UCE de l’ABS envoie la commande pour activer l’unité ABS, celle-ci répond en conséquence, mais le reste du réseau ignore la commande. Il est possible de retirer les nœuds individuels du réseau sans affecter les autres nœuds.
Étant donné que de nombreux composants différents du véhicule peuvent partager le même matériel de bus, il est important que la bande passante disponible du bus CAN soit d’abord attribuée aux systèmes les plus critiques pour la sécurité. Les nœuds sont généralement affectés à l’un niveaux de priorité. Par exemple, les commandes du moteur, les freins et les coussins gonflables sont de la plus haute importance sur le plan de la sécurité, et la plus haute priorité (1) est attribuée aux commandes d’activation de ces systèmes, qui sont activés avant les systèmes moins critiques. Les appareils audio et de navigation sont souvent d’une priorité moyenne (2), et la simple activation de l’éclairage peut avoir la plus faible priorité (3). Un processus dit d’« arbitrage » décide la priorité des messages. Dans la pratique, pour l’utilisateur, toutes les actions semblent être immédiates.
La plupart des réseaux CAN de véhicule fonctionnent à une vitesse de bus de 250 Ko/s ou de 500 Ko/s, bien qu’il existe des systèmes dont le fonctionnement atteint jusqu’à 1 MHz. Les véhicules les plus récents utilisent jusqu’à 3 réseaux CAN distincts, généralement avec des vitesses différentes reliées entre elles par des passerelles. Par exemple, les fonctions de gestion du moteur peuvent être sur un bus haute vitesse à 500 Ko/s, et les systèmes de châssis, sur un bus CAN à 250 Ko/s. Fonctions de maintenance, comme les éclairages, les moteurs à combustion interne, la navigation satellite et les rétroviseurs, sont sur un bus LIN unifilaire séparé basse vitesse. Les données sur l’un des trois réseaux sont disponibles pour les deux autres réseaux par le biais de passerelles, par exemple, pour permettre à la transmission d’obtenir les données depuis le système de gestion moteur, et vice versa.
Le bus CAN est de plus en plus courant sur les véhicules d’aujourd’hui, il sera plus répandu avec le développement des technologies et son coût diminuera.
Informations supplémentaires – Boîte d’essai du CAN
Les 16 broches du DLC sont disponibles sur la boîte d’essai du CAN et numérotées comme suit :
Broche 1 : 485A (informations propriétaires du fabricant)
Broche 2: Bus + ligne J1850
Broche 3: Mise à niveau ultérieure
Broche 4 : Masse du châssis (GROUND)
Broche 5 : Masse signal (SIGNAL)
Broche 6 : CAN H (High) de SAE J2284
Broche 7 : Ligne K de ISO9141-2 et mot-clé 2000485A
Broche 8 : Mise à niveau ultérieure
Broche 9 : 485B (informations propriétaires du fabricant)
Broche 10 : Bus – ligne J1850
Broche 11 : Horloge
Broche 12 : Mise à niveau ultérieure
Broche 13 : Mise à niveau ultérieure
Broche 14 : CAN L (low) de SAE J2284
Broche 15 : Ligne L de ISO9141-2 et mot-clé 2000
Broche 16 : Tension V de la batterie + (tension d’alimentation de 4 A maxi.)
Nous utilisons des cookies pour optimiser notre site web et notre service.
Fonctionnel
Toujours activé
Le stockage ou l’accès technique est strictement nécessaire dans la finalité d’intérêt légitime de permettre l’utilisation d’un service spécifique explicitement demandé par l’abonné ou l’utilisateur, ou dans le seul but d’effectuer la transmission d’une communication sur un réseau de communications électroniques.
Préférences
Le stockage ou l’accès technique est nécessaire dans la finalité d’intérêt légitime de stocker des préférences qui ne sont pas demandées par l’abonné ou l’utilisateur.
Statistiques
Le stockage ou l’accès technique qui est utilisé exclusivement à des fins statistiques.Le stockage ou l’accès technique qui est utilisé exclusivement dans des finalités statistiques anonymes. En l’absence d’une assignation à comparaître, d’une conformité volontaire de la part de votre fournisseur d’accès à internet ou d’enregistrements supplémentaires provenant d’une tierce partie, les informations stockées ou extraites à cette seule fin ne peuvent généralement pas être utilisées pour vous identifier.
Marketing
Le stockage ou l’accès technique est nécessaire pour créer des profils d’utilisateurs afin d’envoyer des publicités, ou pour suivre l’utilisateur sur un site web ou sur plusieurs sites web ayant des finalités marketing similaires.